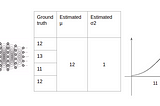
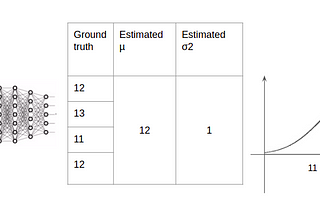
Gain Confidence while reducing uncertainty in Distribution EstimatorsNeural Nets as maximum likelihood estimators of distributionNov 5, 2022Nov 5, 2022
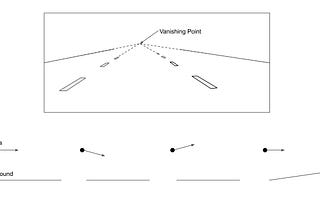
Recovering Extrinsic Matrix (Rotation) with Vanishing PointsHow extrinsic matrix determines vanishing points on image and vice versa.Apr 16, 2022Apr 16, 2022
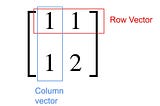
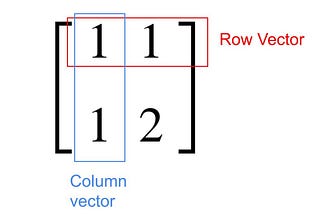
Understanding Rank of Matrix, SVD and Structure of Motion at one timeEnforcing Rank Constraint on SVD in Structure for MotionMar 13, 2022Mar 13, 2022
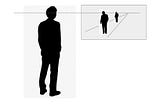
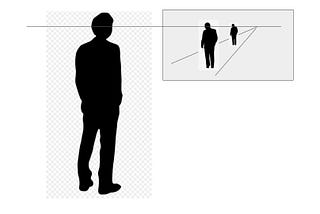
Understanding the Construction of Vanishing Point and HorizonHorizon is the camera height. Why is there no vanishing point?Feb 24, 2022Feb 24, 2022
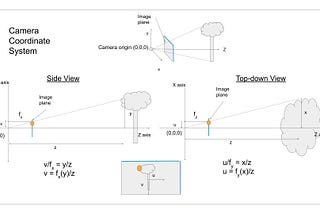
A Single Camera 3D FunctionsIntrinsic Matrix, Extrinsic Matrix, Homography, Inverse Perspective MappingDec 5, 2021Dec 5, 2021
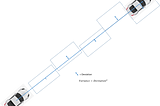
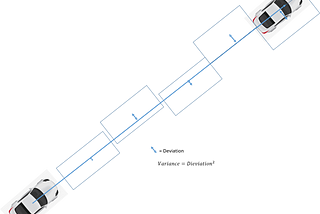
Published inCantor’s ParadiseKalman Filter Explained with Easily Understandable MatricesKalman Filter explained with Kinematics and MatrixesOct 19, 2021Oct 19, 2021
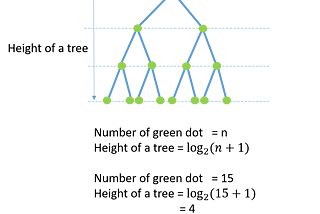
Published inMath SimplifiedIntuition Feel of Logarithms with Binary TreeHeight of binary tree equals log(n)Oct 9, 2021Oct 9, 2021
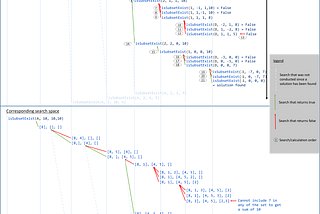
Published inDev GeniusTracing Recursion and Dynamic Programming as Depth-first Search: 3-way partition problemTracing Recursion as depth-first searchJun 21, 2021Jun 21, 2021
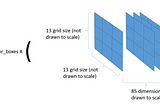
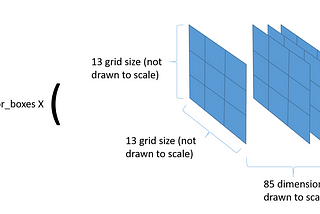
Published inTDS ArchiveCalculating Loss of Yolo (v3)LayerImplementation of Yolo v3 ModelSep 13, 20191Sep 13, 20191